Sơ đồ mạch điều khiển motor brushless
Động cơ không thanh hao than là một trong thành tựu béo phì của ngành cơ khí. Mạch tinh chỉnh của bộ động cơ không chổi than yên cầu bộ tinh chỉnh phải bảo vệ chất lượng để cấp cho nguồn đến 3 trộn của nó. Vì đó, điều khiểnđộng cơ BLDCbằng Arduino, vào đó tốc độ của dòng điện được tinh chỉnh bằng tách áp.
Bạn đang xem: Sơ đồ mạch điều khiển motor brushless
1. Tư tưởng motor không thanh hao than
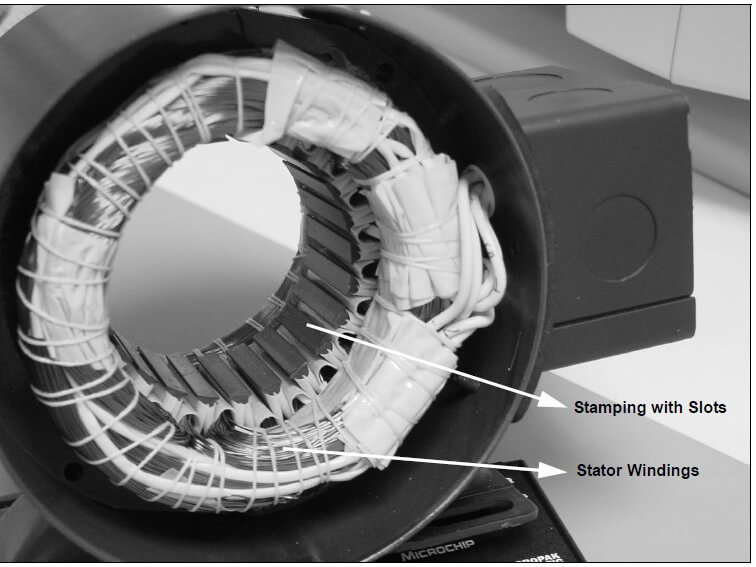
Mạch điều khiển của hễ cơ không có chổi than (hay còn được gọi là động cơ BLDC Brushless DC motor) là 1 loại bộ động cơ điện được gửi mạch bằng điện tử cùng với các nam châm điện mẫu DC được điều khiển dịch rời rotor chạy bao quanh stator.
Thay do bàn chải (chổi than) và máy cắt ở động cơ chổi than thì các module điều khiển và tinh chỉnh motor không thanh hao than lại sử dụng bộ điều khiển và tinh chỉnh động cơ bước nhằm mục đích mục đích tạo ra sự biến đổi năng lượng điện trở thành năng lượng cơ học.
Mạch tinh chỉnh của hễ cơ không có chổi than
2. Nguyên tắc điều khiển động cơ không thanh hao than
Phương pháp điều khiển truyền thống lâu đời của động cơ BLDC đó là đóng cắt những khóa mạch lực (còn điện thoại tư vấn là IGBT hoặc MOSFET) nhằm cấp cái điện vào trong cuộn dây stator mà hộp động cơ dựa theo tín hiệu Hall sensor để đưa về.
Sơ đồ nguyên tắc mạch lực của bộ động cơ được màn biểu diễn như sau:
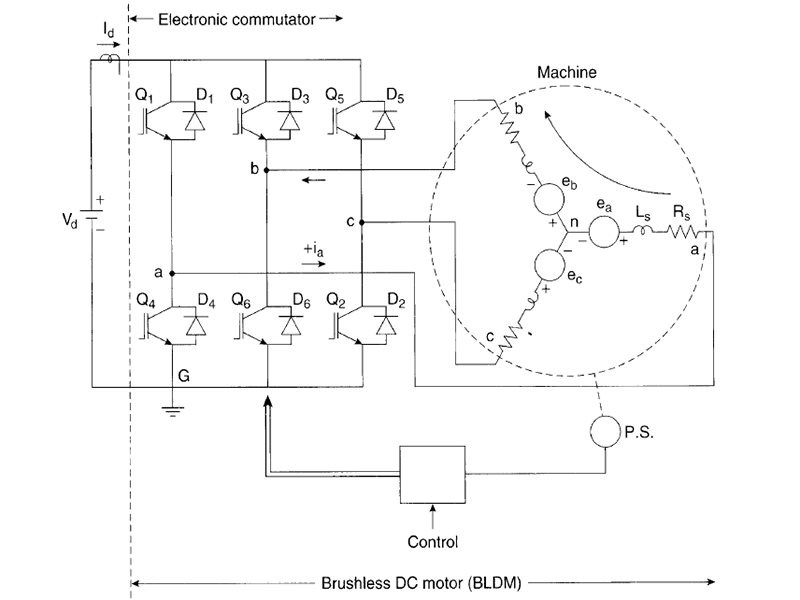
Nguyên tắc tinh chỉnh và điều khiển động cơ không thanh hao than
Chế độ điều khiển và tinh chỉnh này có cách gọi khác là cơ chế điều khiển 120 độ. Đây là chính sách điều khiển cơ phiên bản của bộ động cơ không chổi than, còn các chính sách khác nhất thời thời họ chưa xét đến. Trong một thời điểm bất kì, đụng cơ luôn luôn chỉ có 2 trộn dẫn điện, cho nên vì vậy người ta nói một cách khác đây là cơ chế điều khiển bao gồm 2 pha dẫn. Dưới mỗi pha dẫn, bọn họ thấy đều phải có dòng điện một chiều và 1 sức năng lượng điện động một chiều tồn tại. Bởi vì đó, bộ động cơ BLDC đang tồn tại đặc tính cơ và tính năng điều khiển tựa như với hộp động cơ 1 chiều. Bởi vì thế, hộp động cơ này còn có tên gọi là “động cơ một chiều không có chổi than”.
Trong quy trình khởi động, của hộp động cơ BLDC chạy không tải sau khoản thời gian ta đóng góp tải. Ta thấy cụ thể các trộn (cùng với những màu khác nhau) rứa nhau dẫn điện cùng thể hiện đặc điểm “một chiều” của chúng.
Để thực hiện nguyên lý điều khiển bộ động cơ trên, thông số kỹ thuật điều khiển vào dải trễ dòng điện (còn call là Hysteresis Current Control – cam kết hiệu HCC) sẽ được triển khai và đó là thông số kỹ thuật điều khiển mẫu mã mực cho động cơ BLDC.
Dễ nhận thấy rằng, khi sử dụng phương pháp điều chỉnh cái điện HCC, ta tất cả dòng điện đưa mạch cho tới 6 lần trong một chu kì. Sự đưa mạch này không lý tưởng (không tức thời, thời hạn chuyển mạch lên và xuống cũng không bởi nhau) gây ra những điểm yếu của hộp động cơ BLDC, chính là nhấp nhô tế bào men quỹ đạo từ thông ko được tròn và cạnh tranh xác định.
Nhấp nhô moment (còn hotline là torque ripple) được coi là điểm yếu ớt của hộp động cơ BLDC. Gần đây, sẽ có một trong những lượng to các nghiên cứu về động cơ BLDC nhằm kim chỉ nam làm sao sút thiểu được sự mấp mô này.
Thông thường, quỹ đạo trong từ thông của đụng cơ bắt buộc phải có hình tròn, nhưng bởi dòng điện có sự gửi mạch ko lý tưởng cần quỹ đạo từ bỏ thông của bộ động cơ BLDC gồm đến 6 “gai” và “bậc” trong 1 chu kì. Bài toán ước lượng trường đoản cú thông tại các “bậc” này cũng khá khó khăn, vì thế rất nặng nề để điều khiển từ thông trong động cơ BLDC. Việc điều khiển và tinh chỉnh động cơ BLDC tự trước đến thời điểm này do đó đều bỏ qua quá trình điều khiển từ thông của nó.
3. Sơ đồ với cách tinh chỉnh động cơ không thanh hao than
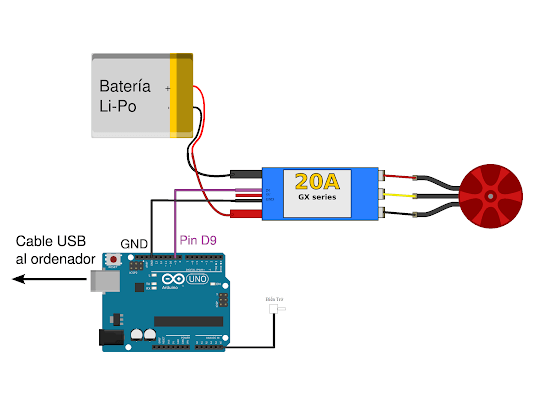
Động cơ BLDC gồm tới 3 dây trong khi module của chính nó chỉ hỗ trợ 2 dây. Vậy đề xuất làm sao? họ sẽ sử dụng một thiết bị tinh chỉnh và điều khiển mới điện thoại tư vấn là ESC. ESC có tác dụng điều tốc mang lại motor brushless, được hoạt động bằng phương pháp băm xung chạy mang đến chân tín hiệu.
Sơ đồ dùng dây như sau:
Bên phải: bao hàm 3 dây được nối cùng với 3 dây motor. Chú ý: Nối dây chính giữa của ESC với dây trọng tâm của đụng cơ, còn 2 dây còn lại có hay là không cũng không quan trọng. Bởi vì nếu hòn đảo 2 dây này thì chỉ có chức năng đổi chiều motor.Bên trái: gồm 2 dây to chính là dây cấp nguồn hiệu suất cho motor. Ta thấy 3 dây bé dại lại cũng rất giống cùng với 3 dây servo. Vị lẽ, nó chuyển động và có code xây dựng khá như là với bộ động cơ servo vận động cùng cùng với băm xung.Chức năng của 3 dây này như sau: Dây đen chính là cực âm, còn dây đỏ vận động sẽ đã tạo ra nguồn 5V, dây vàng chính là dây biểu thị nối cùng với arduino (được nối vào chân PWM).
Sơ đồ dùng cách tinh chỉnh động cơ không chổi than
4. Điều khiển cồn cơ không có chổi than cần sử dụng Code Arduino
Tất cả các thiết bị đầu cuối tiếp địa bên trong động cơ được kết nối với nhau. Như đang nói sinh hoạt trên, bộ động cơ BC cũng chính là động cơ 3 pha. Trong sơ thứ mạch trên, bao hàm 3 quy trình được đặt tên, đó là: quá trình A, quy trình tiến độ B và tiến độ C.
Xem thêm: Bảng Giá Xe Tải Hoa Mai 3 Tấn, Xe Tải Ben Hoa Mai 3 Tấn Đời Mới 2022
Ba điện áp 33K đầu tiên còn được liên kết với những pha của hễ cơ. Đồng thời, 3 năng lượng điện trở 10K cũng khá được sử dụng để gia công bộ phân tách điện áp, 3 năng lượng điện trở 33K còn lại nhằm mục đích tạo ra điểm tự nhiên và thoải mái ảo.
Trong dự án này, cần thiết phải sử dụng 3 bộ đối chiếu để so sánh BEMF của từng pha so sánh cùng với điểm tự nhiên ảo. Vì chúng ta cần phát hiện nay ra các điểm giao nhau được tính bằng 0 của từng pha, tại chỗ này động cơ thực hiện chip để so sánh tứ giác LM339.
Điểm ảo sẽ được kết nối cùng với đầu vào nhằm đảo ngược rất (-) của 3 bộ so sánh như vào sơ đồ dùng mạch điện được diễn đạt ở trên. BEMF A được liên kết với chân không hòn đảo cực (+) của bộ so sánh số 1. Còn BEMF B lại được kết nối vào cực (+) của bộ so sánh số 2, đồng thời, BEMF C cũng được kết nối với rất (+) của bộ so sánh 3. Bộ đối chiếu số 4 ko được thực hiện và đầu vào của nó chính là thiết bị đầu cuối vì thế nó được tiếp địa.
Như họ đã biết được rằng, đầu ra của cục so sánh đó là logic một trong trường hợp điện áp không đảo có độ lớn hơn điện áp nghịch đảo trong động cơ và ngược lại. Những đầu ra LM339 đó là bộ thu mở, tất cả nghĩa là chúng ta cần 1 điện trở đẩy lên để phục vụ cho mỗi đầu ra, do đã bộ động cơ đã thực hiện 3 điện trở 10kΩ. Đầu ra của 3 bộ đối chiếu sẽ được kết nối với những chân Arduino số 2, 3 cùng 4, các chân này khớp ứng cho các phần tử BEMF A, BEMF B cùng BEMF C.
Các chân Arduino UNO số 2, 3 với 4 đề xuất lần lượt là những chân ngắt vi điều khiển và tinh chỉnh có ký hiệu là ATmega328P PCINT18, PCINT19 và PCINT20.
Các chip IR2101 lúc này sẽ được sử dụng để điều hành và kiểm soát các mosfet tại mặt cao và mặt thấp trong từng giai đoạn. Việc thay đổi giữa 2 bên cũng khá được thực hiện nay theo các dòng điều khiển có tên là HIN với LIN.
Các đường HIN của 3 IR2101 còn được liên kết với những chân số 11 10 9 tương xứng với những pha A, pha B và pha C. Arduino UNO có thể tạo ra biểu đạt PWM trên các chân nhưng mà chỉ có những mosfet phía cao mới được quyền điều khiển.
Các con đường LINE được liên kết với các chân Arduino 7 6 5 khớp ứng với những pha A, trộn B cùng pha C. Phân tách áp 10K cũng được sử dụng để làm đổi khác tốc độ củađộng cơ BLDC, từ bây giờ đầu ra của chính nó được liên kết với một kênh quảng cáo khác tương tự Arduino 0, chính là A0.
5. Những loại mạch điều khiển và tinh chỉnh của động cơ không chổi than bên trên thị trường
a) Mạch điều khiển vận tốc của bộ động cơ BLDC DC 5V-12V 2A 15W
Đây là một mạch điều khiển tương đối nhỏ dại gọn (kích thước chỉ tất cả 30 x 25mm) mà lại có tương đối đầy đủ chức năng, tuy vậy đây cũng chính là nhược điểm do nó không tồn tại chỗ bắt dây dẫn bằng ốc vít mà phải cắm bằng Jump. Bên trên mạch tất cả sẵn rứa xoay để kiểm soát và điều chỉnh tốc độ cũng giống như các đèn báo nguồn, đèn báo lỗi mặt khác báo tốc độ và chân gặm khi họ chọn chiều tảo điều khiển.
Với điện áp nguồn DC có đầu vào từ DC 5V 12V (max là 15 V), lúc ấy mạch này sẽ mang đến ra công suất tối đa là 15W và chiếc điện 1.5A (max là 2A). Ở tốc độ lớn nhất, hộp động cơ này có thể điều khiển lên đến mức vận tốc 10.000 vòng quay/ phút (10000 RPM). Lúc mua mạch điện này, chúng ta còn được tặng ngay kèm một cọng sạc cáp để hoàn toàn có thể nối với nguồn và rượu cồn cơ.
Mạch điều khiển tốc độ của động cơ BLDC DC 5V-12V 2A 15W
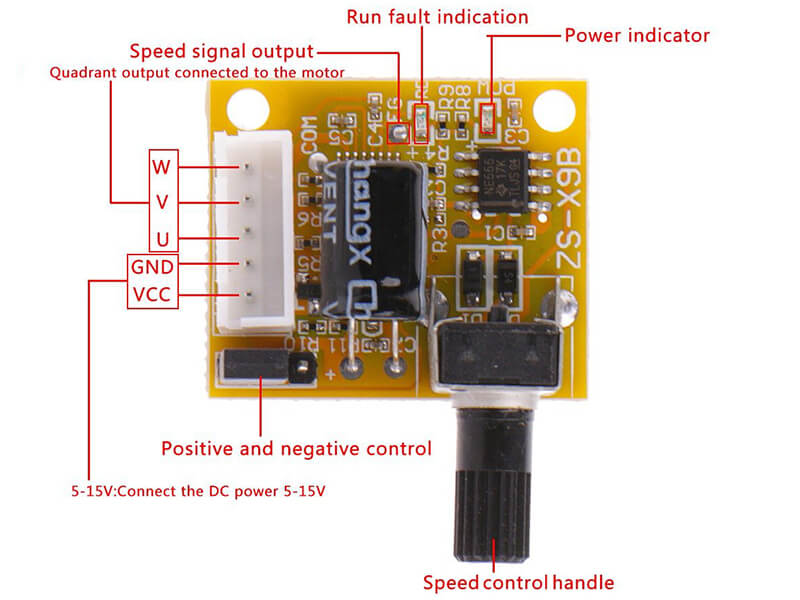
b) Module không chổi than 7-12V, 1.2A sử dụng biến trở chỉnh tốc độ kde4578
Là module điều khiển và tinh chỉnh không chổi than có ngân sách chi tiêu tương đối rẻ, chỉ ở mức 100K, các bạn đã sở hữu thể tinh chỉnh tốc độ thủ công (sử dụng trở nên trở) và hòn đảo chiều tảo bằng vấn đề chọn cắn Jump.
Mạch cần sử dụng của nguồn khá rộng (từ 7V 12V, với trên mạch còn được thêm Diode để bảo vệ ngược mang đến cực nguồn. Để lắp dây vào mạch, chúng ta sử dụng những đầu nối vít M3 để tháo dỡ lắp dây mang đến thuận tiện.
c) Bộ điều khiển động cơ không tồn tại chổi than bao gồm 24v 36v 48v 250w 350w
Đây là 1 mẫu mạch điều khiển cực kì chuyên nghiệp, nó được quấn trong một mẫu hộp kha khá chắc chắn. Với đó là tương đối nhiều đầu vào ra mang đến khả năng tinh chỉnh động cơ một cách linh rượu cồn nhất, hoàn toàn có thể sử dụng vào nhiều một số loại máy móc không giống nhau, nhất là các trang thiết bị yêu mong độ có đúng đắn cao. Cũng bởi vì vậy, nó gồm một nấc giá không hề nhỏ cũng là điều hiển nhiên.















